2장은 Markov Process(MP), Markov Reward Process(MRP)에 대해 살펴보도록 하겠습니다. Markov Decision Process의 경우는 다음 게시물인 Lecture2 (2)로 분리하여 정리하였습니다.

- MDP는 learning을 위한 env를 묘사한다.
- env가 fully observable한 상황에서
- 현재 state가 현재의 프로세스를 완벽하게 표현하는 경우 == Markov한 상황
- 대부분의 RL 문제들를 MDP로 formalised 할 수 있다.
Optimal control, Bandit와 같은 문제들을 MDP로 전환가능

- "현재가 주어져 있다면, 미래는 과거와는 독립적이다. "
- state가 모든 history와 관련된 모든 정보들을 가지고 있기 때문에, state를 아는 순간 history를 버릴 수 있다.
- state는 미래에 대한 충분한 통계적 표현형이다.

- state transition probability(Pss'): s에서 s'으로 갈 확률
- state transition matrix: Pss'을 matrix 형식으로 나타낸 것
ex) P11: state가 1에 있을 때, 다음 state가 1에 있을 확률
P1n: state가 1에 있을 때, 다음 state가 n에 있을 확률

- memoryless: 내가 어느 경로를 통해서 왔는지 상관 없이, 여기 온 순간 미래가 정의된다 == Markov property
- random process: 어느 state에서 시작해서 계속 이동해도 다양한 결과가 나온다는 sampling을 가능하게 함
state가 n개 있고, matrix는 n*n만큼 크기를 가지고, 이를 만족할 시 Markov Process는 완전히 정의 가능
- S: state들의 set
- P: state transition 확률 matrix

state 7개, state의 transition 확률은 화살표로 표기
- episode(start->terminal state까지 가는 과정)를 sampling이라 부른다. ==simulation
Markov Process에서 sampling ex) C1 C2 C3 Pass Sleep, C1 FB FB C1 C2 C3 Pub C2 Sleep

State Transition Matrix로 나타낸 Markov Process topology

env에는 reward가 존재하므로 Markov Process <S,P>에 R와 r를 추가하면 Markov reward Process를 완전 정의 가능
- R: reward function, 어떤 state에 도달하면 reward 축적
- r: discount factor
Markov Process + Reward , discount factor = Markov Reward Process
MRP에서는 action이 존재하지 않고(action에 reward가 아닌 state에 reward 이므로), 확률적으로 state만을 선택함

state마다 reward가 설정되어 있음

- Return Gt = cumulative discounted reward
- discount factor 'r'은 미래 reward에 대한 현재 value이다.
- 미래에 받는 reward에 대해 k time-steps에 따른 r^k만큼의 감산을 누적한다.
- r이 0에 가까울 수록 "근시안적인" 평가
- r이 1에 가까울 수록 "원시안적인" 평가

- 수학적으로 편리하기 때문(수렴성 증명)
sampling 중 만약 모든 sequence가 terminal state로 끝나는 것이 보장된다면, r=1이 가능할 수도 있음.

State Value function: 한 state에서 sampling된 return들의 기댓값
기댓값: 어떤 확률 과정을 무한히 반복했을 때, 얻을 수 있는 값의 평균으로서 기대할 수 있는 값. 보다 엄밀하게 정의하면 기댓값은 확률 과정에서 얻을 수 있는 모든 값의 가중 평균이다.말만 기댓값이지 확률이랑 똑같은 거다

sampling시에 같은 state에서 시작해도 episode마다 다른 return 값들이 생성되고 이에 대한 평균치가 v(s)
특정 state에 도달했을 때 어느정도의 return을 받을지 기댓값

r=0이기 때문에, reward와 v(s)가 같은 결과를 보임(short-sighted)

r=0.9일 때의 sampling을 통해서 계산한 v(s)(far-sighted)

- Bellman Equation: value function은 즉시 reward인 Rt+1과 나머지 discounted value인 r*v(St+1)로 분해된다.

sampling을 통한 기댓값으로 평균을 내는 것이 아닌 확률적 수학 계산을 통한 방식 표현
상단의 식에서 Expectation을 풀이해서 쓰면 다음 꼴로 표현
v(s) = s에서의 reward + r * ( Pss'의 각각 확률 * v(s')의 합들)

v(s)들의 유기적 연결이므로 MRP에서는 한번에 해결 가능 ex) 4.3 = -1 + 0.6 * 10 + 0.4 * 0.8
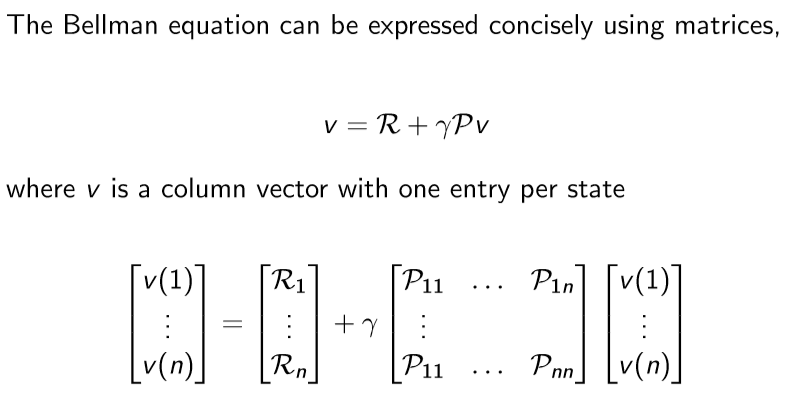
벡터와 행렬을 이용한 Bellman Equation 표현
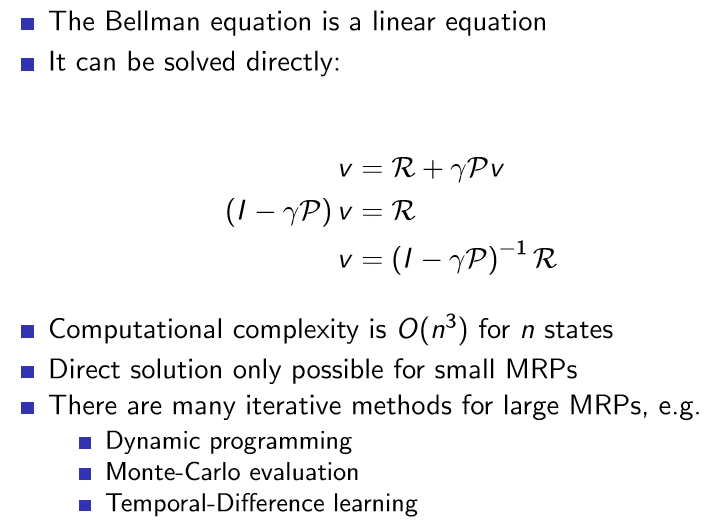
- Bellman Equation은 선형 방정식인데, 다음의 식을 통해 v(s)를 directly하게 계산 가능하다.
v = R + rPv => v = {(1 - rP)^-1}*R
- 계산 복잡도는 n개 states시에 O(n^3)이므로 n^3에 비례하여 상당히 비싼 연산
- 따라 small MRP에서만 Direct solution은 사용 가능하다.
- 큰 MRP의 경우에는 Dynamic programming, Monte-Carlo evaluation, Temporal-Difference learning 방식의 iterative methods들이 사용된다.
아래는 교재 및 참고 블로그, 유튜브 강좌입니다.
deepmind.com/learning-resources/-introduction-reinforcement-learning-david-silver
Interested in learning more about reinforcement learning? Follow along in this video series as DeepMind Principal Scientist, cre
We research and build safe AI systems that learn how to solve problems and advance scientific discovery for all. Explore our work: deepmind.com/research
deepmind.com
youtube.com/watch?v=NMesGSXr8H4&list=PLpRS2w0xWHTcTZyyX8LMmtbcMXpd3s4TU&index=2
'논문 리뷰 > RL' 카테고리의 다른 글
| Lecture 6: Value Function Approximation (0) | 2021.01.19 |
|---|---|
| Lecture 5: Model-Free Control (0) | 2021.01.18 |
| Lecture 4: Model-Free Prediction (0) | 2021.01.15 |
| Lecture 3: Planning by Dynamic Programming (0) | 2021.01.13 |
| Lecture 2: Markov Decision Processes (2) (0) | 2021.01.05 |
| Lecture 1: Introduction to Reinforcement Learning (0) | 2021.01.04 |




댓글